WINMAN GRİPPER SİSTEMLERİ
Pnömatik sistemler ; yaygın olarak kullanılmalarının en önemli nedenleri; havanın sınırsız temiz ve zehirli olmaması,basınçlı havanın uzun mesafelere kolaylıkla taşınabilmesi, ısıya karşı hassas olmaması, devre elemanlarının basit yapılı,hafif ve ucuz olması, yüksek hızlara çıkılabilmesi, kademesiz hız ayarına olanak tanıması,depo edilebilirlik gibi pek çok avantajlara sahiptirler. Bundan dolayı sürekli olarak kullanım alanları genişleyerek farklı uygulamaklarda karşımıza çıkmaktadır.
Tutma, bırakma, taşıma,sıkıştırma gibi işlemleri gerçekleştirmek için pnömatik sistemler çok yaygın olarak kullanılmaktadır. Bu amaçla kullanılan mekanizmalar gripper (tutucu, yakalayıcı) olarak isimlendirilmektedir. Yapılacak işin büyüklüğüne ve uygulanma şekline bağlı olarak geniş bir çeşitlilik kazanmaktadırlar.
Bu geniş çeşitlilikten dolayı müşterilerimizin isteklerini en doğru şekilde karşılayabilmek için bazı ürünleri WINMAN markasıyla ithal etmekteyiz. %100 yerli olarakta en popüler şekilde kullanılan parelel, açılı ve manyetik gripperlar üretmekteyiz. Bununla birlikte müşterilerimizin özel istekleri için Ar-Ge birimimiz çalışma yapabilmektedir. Ayrıntılı bilgilere telefon, mail ve internet üzerinden ulaşabilirsiniz.
Parelel ve açılı gripper mekanizmalarının temel çalışma prensibi; sıkıştırılmış hava ile çalışan bir silindir ve silindir pistonuna bağlı elemanlar vasıtası ile kuvvetin farklı elemanlara aktırılması şeklindedir. Ürettiğimiz parelel ve açılı gripperların en önemli avantajları; kompakt yapı sayesinde az yer kaplamaları, düşük ağırlıkları, yüksek çevrim ve esnek yapıda olmalarıdır.
Yaygın olarak kullanım alanları; imalat ve montaj işlemlerinde genelde ambalaj ve lojistik uygulamalardadır. Esnek olarak ürettiğimiz bu gripperlara istenilen bağlantı şekline göre (noktasal, çizgisel, yüzeysel) farklı ayaklar bağlanarak en uygun bağlantı şekli sağlabilir.
Bağlantılarda dikkat edilmesi gerekenler :
1 İş yapılacak parçaya göre; sıkıştırmadan tutmak, kısmen sıkıştırmak(tek taraflı olarak), sıkıştırmak seçeneklerinden uygun olana karar verilmelidir. Uygun seçimi yaptıktan sonra parçanın şekline göre,özel yapılacak kollar kullanılmalıdır.Çünkü tutma esnasında deformasyonlar meydana gelebilir.
2 Sıkıştıma işlemleri için yapılan hesaplamalar sonucunda gripper pistonundan alınabilecek teorik maksimum kuvvete göre seçim yapılmaktadır.Ne yazık ki piyasada bazı ürünlerin kataloglarında dahi bu şekilde belirtilmiştir.Gerçekte bu değerlere ulaşılamayacağını unutmayınız. Bu tür mekanizmalarda piston kaybı, sürtünmeler, ana kuvvet yönünün değişimine bağlı vektörel kayıplar mutlaka vardır.
3 Madde 2 de bahsedilen durumun ana nedeni çok sayıda değişken faktörün(tutucu kolların formu, iş yapılacak yükün formu, ağırlıklar, temas şekli, temas yüzey kaliteleri, sürtünmeler,sıcaklık...vs) olmasından ileri gelmektedir. Bunlara bağlı olarak değişkenlikler görülecektir. En uygun performansı elde etmek için ; parçaların alınmasında, yönlendirilmesinde, uygun konumda bırakılmanın sağlanabileceği tutucu yapısı tasarlandıktan sonra gerekli hesaplara geçilmelidir. Bununla birlikte bağlantı bölgelerine titreşim sönümleyici elemanlar kullanarak uygun bağlantı işlemi yapılırsa daha kararlı ve yüksek parformans elde edebilir.
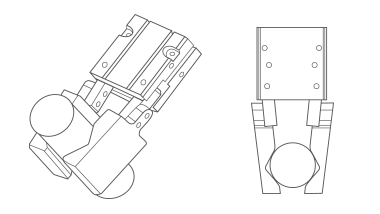
-Örnek olarak yanda 25 V- gripper ile yapılan kaldırma kuvveti testi görünmektedir. Özel kollar resimde görünen Ø40 ağırlık için tasarlanmıştır. Aynı testi Ø55 numune yapıldığında kaldırma kuvvetinde %40 azalma görünmektedir. Çünkü parçayı istenilen seviyede kavrayamamaktadır.
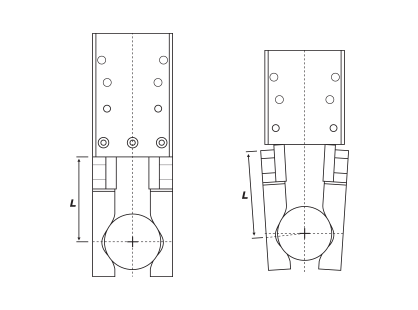
4-) Gripperın kollarına bağlanacak tutucuların belirli bir uzunluğu vardır ve bu uzunluğu aşmanın mekanizma içindeki moment ve gerilimleri kritik seviyelerin üzerine çıkaracağı unutulmamalıdır. Özel kol tasarlanacak ise tasarımcı bu durumu göz önüne almalı ve mümkün olduğunca tutma bölgesi kısa tutulmalıdır.(WGRP ve WGRV gripperlar için maksimum L mesafesi aşağıda belirtilmiştir).
Özel durumlar haricinde pratik olarak seçiminizde alttaki tablo ve örneklemeden yararlanabilirisiniz;
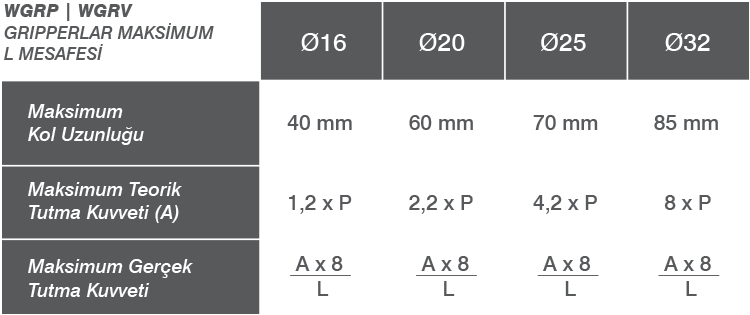
Örnek: Ø25 gripper ile 5 barda kaldırılabilecek maksimum yük hesabı;
A=4,2 x 5 = 21 kg-f
Yukarıda belirtilen L ölçümüz 50mm ise;
F=21 x 8 =3,36 kg-f
50
Emniyet katsayısını 1,5 kabul eder isek;
3,36 : 1,5 = 2,24 kg-f kaldırılabilir.